What is soft starting
of an induction motor
Describe with a
circuit using thyristor used for soft starting
Discuss its
advantages and disadvantages.
A soft starter is
another form of reduced voltage starter for A.C. induction motors. The soft
starter is similar to a primary resistance or primary reactance starter in that
it is in series with the supply to the motor. (Three wire or standard
connection) The current into the starter equals the current out. The soft
starter employs solid state devices to control the current flow and therefore
the voltage applied to the motor. In theory, soft starters can be connected in
series with the line voltage applied to the motor, or can be connected inside
the delta loop of a delta connected motor, controlling the voltage applied to
each winding. (Six wire or Inside Delta connection)
Soft starters use a
combination of power electronics and electronic control circuitry to slow
increase the voltage on the motor during starting; ensuing a smooth
acceleration.
This method of supplying a gradually increasing a.c.
voltage during start-up generally refers to an efficient electronic
switching technique
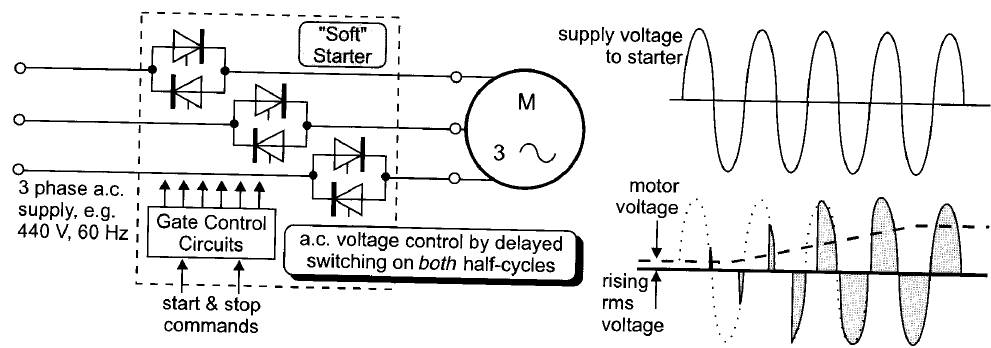
A basic
method shown in
Fig is to use back-to-back
connected thyristors or triacs in
the supply lines
which are "gated" to delay "turn-on" within each a.c. half-cycle.
This delayed switching applies a
reduced average a.c.
voltage to the motor.
The applied motor
voltage is gradually ramped up by the
starter software program until the full voltage level is reached. To
achieve maximum efficiency, the electronic
switching circuit can now be bypassed for normal
running.
Soft starters use
thyristors (Silicon Controlled Rectifier) to control the energy delivered to
the motor. A thyristor is a device which turns on when a pulse is applied
to its gate and will continue to conduct until the current drops to zero (at
which time it turns off). In an AC sine wave current goes to zero
each half cycle, allowing the current to be turned off and making it possible
to use use thyristors to implement soft starting.
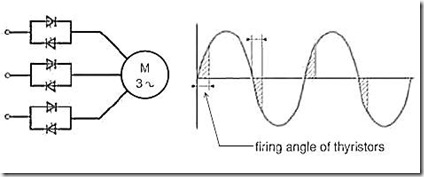
Voltage Control by Thyristor Firing
If the thyristors are
turned on at the start of each half cycle, the full voltage is applied to the
motor. If the thyristors are never turned on , then no voltage is
applied. If the thyristors are turned on part way through the half cycle
only a proportion of the voltage will be applied to the motor. By
controlling the turning on (firing angle) of the thyristors the amount of
voltage on the motor can be controlled. Starting with a large firing
delay, this is gradually reduced and the voltage on the motor will ramp-up
during starting.
In addition to
starting, soft start units can also be used for stopping the motor, by ramping
the voltage down. This is particularly useful where sudden loss of
driving torque would create mechanical shock on the load.
Electronic soft
starters contain the thyristors (power side) and necessary electronics to
control the firing (via user settings). Modern soft starters have a host
of features; the most common being options to set varying start and stop ramps,
setting of the initial starting voltage, current limiting control and thermal
overload protection.
The easiest
application of electronic soft starters is one unit per motor. To reduce
cost, sometimes more than one motor is connected in parallel to a soft starter,
or motors are started in sequence by switching the soft start unit between
motors. While these methods can be used, care has to be taken to ensure
that the units are adequately rated for the required duties.
As a cautionary note,
firing of thyristors other than a zero voltage (current) will create a
non-linear load characteristic, generating transients and
harmonics. In general application (and given that the
transients/harmonics are only present during starting) these are not a
problem. However, there could be instances and special situations where
these do have an adverse effect on the power system.
Power and Control
Circuiting
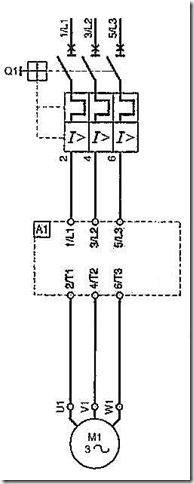
Power Circuit
The figure
illustrates possibly the simplest connection of an electronic soft
starter. In this the unit is simply connected into the circuit and
carries out the necessary functions.
While this is the simplest
implementations, you will often find a bypass contactor (to switch-out the
thyristors when the motor is up to speed) and a line contactor to switch the
circuit in/out. Other variations of control circuit would include
cascading start and control for both forward and reverse directions.
Invariably there would also be communications to either control or monitor the
functioning of the motor.
Features and
Application
Soft starters have
many features not found in traditional starting methods and which can be of
benefit in some situations. These include:
Adaptive Acceleration
Control - soft starter learns motor’s performance during start and stop,
then adjusts control to optimize performance
Soft Stopping -
slowly bring the motor to a stop
DC Braking -
injecting DC to reduce motor stopping time
Soft Braking -
changing contactors on starter input, reversing motor direction and applying
braking
Current Limiting -
limit starting current to a pre-defined value (may lower torque to much and
motor may not accelerate)
Current Ramping -
increasing the current over a given time to a specified limit
Jog - allows the
motors to be run at reduced speed for some time
Kick Starting -
using a brief high bust of current at the motor start to get it going, then
reducing the current
Thermal Modeling -
motors the motors thermal characteristic, allow performance optimization
Communication - most industrial protocols will be supported, enabling enhanced
control/monitoring
Line contactors can
be used (but not strictly necessary) to isolate the soft start when not in use
(should be rated AC3). If required, by-pass contactors can by used to minimize
heat build up due the to SCR's (can rated AC1 as they do not carry starting
currents).
Sequence starting -
can be used to start several motors in sequence (or parallel). Starters needs
to be rated for full start duty. Additional wiring, contactors and control
relays may not make this an economic option.
Power factor correction if required should only be installed on the line side
and switched in when the motor is at full speed (AC6 contactors). Capacitors
installed on the motor side can cause resonance, increased voltages and
equipment failure.
Inside delta
connection is a technique which can be used with six winding motors. In this
configuration, only have the delta is completed in that starter, thus reducing
the current the starter is required to carry. On some soft starters are able to
be used in this type of application.
Characteristics:
Available starting
current: 25 to 75%, adjustable
Peak starting
current: 2 to 5 In, adjustable
Peak starting
torque: 10 to 70%, adjustable
Advantages:
Soft start enhances
motor start performance in many ways including:
➜ Smooth acceleration without
the torque transients associated with electro-mechanical
reduced voltage starters.
➜ Voltage or current is
applied gradually, without the voltage and current transients
associated with electro-mechanical reduced
voltage starters.
➜ Lower start currents and/or
shorter start times because constant current control gives
higher torque as motor speed increases.
➜ Easy adjustment of start
performance to suit the specific motor and load.
➜ Precise control over the current
limit.
➜ Consistent performance even
with frequent starts.
➜ Reliable performance even
if load characteristics vary between starts (eg loaded or
unloaded starts).
In addition to
superior starting performance, soft starters also provide a range of features
not
available from other
reduced voltage starters. This includes areas such as:
➜ Soft stop (which helps
eliminate water hammer) ➜ Metering and monitoring
➜ Braking ➜
Operating history and event logs
➜ Motor and system protection
➜
Communication network integration
Disadvantages:
More Expensive
Can Inject Transients
into Supply