Compare methods of obtaining speed regulation of 3 phase
induction motors generally used in tankers by means of rotor resistance.
Cascade system. Pole changing. Give examples where each system may be employed
with advantages.
The speed of an
induction motor is given as N = 120f/p (1-S). So obviously the speed
of an induction motor can be controlled by varying any of three factors namely
supply frequency f, number of pole P or slip S.
Rotor Resistance Control.
This method of speed
control has characteristics similar to those of dc shunt motors controlled by
means of resistances in series with the armature.
This method is
applicable for slip ring motors.
It is same as that of
armature control method for dc series motor.
A star connected, 3
phase rheostat is joined in series with the rotor circuit via slip rings.
Here slip rings are
not short circuited as they are when rheostat is only used for starting of
a induction motor.
Slip for a given
torque can be varied by varying the rotor resistance.
But the main
disadvantage of this method is I^2.R (Cu) losses are also increased with
increase in rotor resistance.
Because of these
increased losses this method is used where speed control is required for a
short time.
Its drawbacks are lower
efficiency and poor speed regulation due to increase in motor resistance.
Because of
convenience and simplicity, it is often employed when speed is to be reduced
for a short period only.
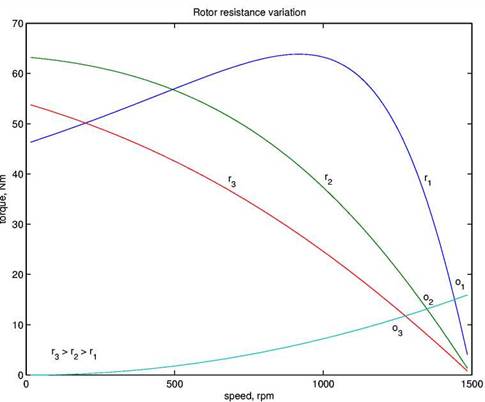
Figure Speed-torque
curves : rotor resistance variation
Speed Control by Cascade Arrangement.
In this method, two
motors are required, at least one of which must have a wound rotor. The
two motors may be mechanically coupled together to drive a common load. In
practice, it is customary, to connect the rotor output of first machine to the
stator of second machine in such a way that the revolving field of both the
machines are in the same direction; under this condition the resulting
synchronous speed will be given as
Ns = 120f/P1 +P2
Where f is supply
frequency and P1 and P2 are the number of poles on machines
I and II respectively.
Further speed
control, if required, can be obtained by having second machine also of wound
rotor type and inserting control resistance in the rotor circuit of the second
machine.
By changing of Number of Poles.
This method is
generally not applied to slip-ring motors as in such machines this method would
involve considerable complications of design and switching, since the inter-connections
of both primary and secondary would have to be changed simultaneously in a
manner to produce the same number of poles in both windings. With two
independent sets of stator windings, each arranged for pole changing, as many
as four synchronous speeds can be obtained in a squirrel cage motor. This
method has the advantages of simplicity, good speed regulation for each
setting, high efficiency, and moderate first cost and maintenance. This
method is very satisfactory for applications such as ventilating fans,
conveyors, machine tools, or other applications which require operation at only
two or four speeds.