In control parlance explain these
elements that allow for
(i) Stability;
(ii) load change;
(iii) fast response.
REASON FOR AVR
Starting of large induction motors
(always with a low pf of 0.3 - 0.4 lagging) causes
sudden load current surges (6 - 8 times normal).
Large voltage drop in generator
winding reduce terminal voltage at the load.
The effect is voltage dip. Similarly stopping of large motors will
produce an over-voltage on bus bars.
BS 2949 and LRS requirements
specify the minimum performance for ship’s generators.
The real need for an AVR is to deal
with the voltage dip following the sudden connection of extra load and to
restore the voltage quickly without undue overshooting of regeneration (voltage
hunting).
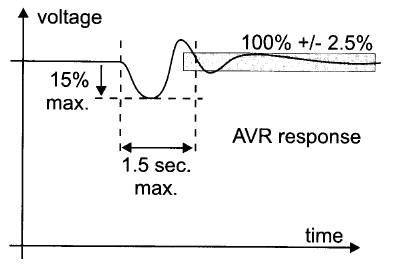
AVR will control the generator's
voltage to ±2.5% (or better) of its set value over the full load range. This is
its steady-state voltage regulation.
Transient voltage dip is usually limited to
15% for a specified sudden load change with recovery back to rated voltage
within 1.5 seconds
Stability. Error
operated system can be unstable if the gain is too high. Stability can be
achieved by reducing the gain and introducing damping. The out path derivative damping
signal based on dv/dt rate of change is used to
provide stability. Error operated signal is sent to correct the action.
Load change. If
the load changes the voltage changes. The comparator
compares the voltage value to the set value and create an error signal
which result in correcting action i.e. changes in rotor current.
Fast
response.
Is achieved
with high gain and low damping load which leads to instability. At the
start up, fast build up of voltage is achieved by bypassing the AVR and
supplying maximum current until generator voltage is close to desired value. As
damping is introduced speed of response decreases, gain of error amplifier is
increased to reduce response time.