Question
With reference to the operation of
governors fitted to diesel alternators that generally operate in parallel:
Explain why an isochronous
characteristic is undesirable;
State what is meant by droop and
give an analogy of droop in control engineering terms;
Sketch a load/frequency diagram
showing how two generators share the electrical load.
In a generator with isochronous
characteristics the frequency stays constant as KW load changes but the
machines cannot run in parallel
Hence an isochronous characteristic
is undesirable
With an isochronous characteristic
the load swing repeatedly from one machine to another because the
characteristic have no definite cross over point.
Droop.
If 2 generator are to share load
their governor characteristic must have a definite crossing point. That is why
governor droop is necessary.
Governor and AVR characteristic
must have a small amount of droop to ensure stable parallel
operation. A change in speed from full load to no load is called as droop.
After the incoming generator has been
synchronised it is now ready to take up load. It will be recalled that the
generator will have to provide two types of ac power, kW and kVAr load sharing.
After synchronising, GEN1 is still
supplying all the load kW while GEN2 supplies zero kW. The governors of both
machines are producing 60 Hz. This situation can be depicted graphically below.
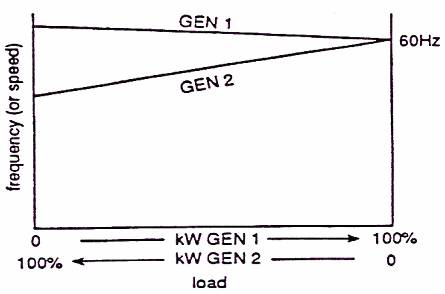
The kW of GEN2 are measured right
to left. It can be seen above that both machines are producing 60Hx, GEN1 is
supplying 100% of the load kW and GEN2 is supplying 0 kW.
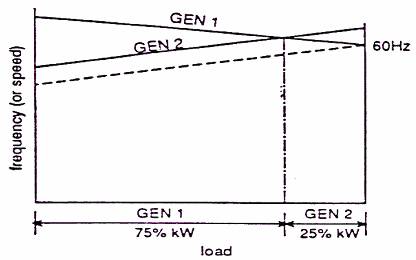
GEN2 can be made to supply Kw by
adjusting its speed trimmer to increase the set point of the governor as shown
above. This has the effect of ‘lifting’ the whole characteristic which results
in GEN2 taking load and GEN1 losing load. A problem is that the system
frequency increases.
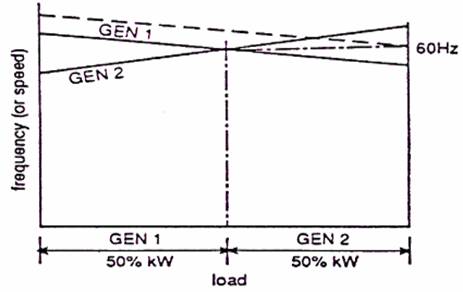
Now the speed trimmer of GEN1 is
adjusted to reduce the set point of the governor see above. This lowers the
characteristics of GEN1 allowing GEN2 to take up more of the load and brings
the frequency back to 60Hz. This load balancing is monitored on the kW meters
of each machine.
If two generators are to share load
their governor characteristics must have a definite ‘crossing point’ that is
why governor ‘droop’ is necessary.
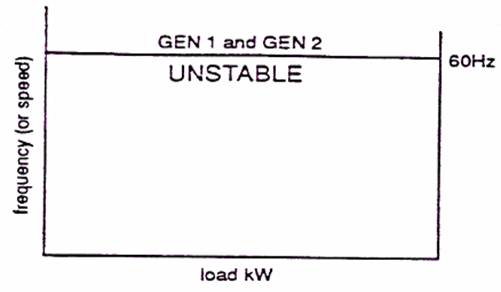
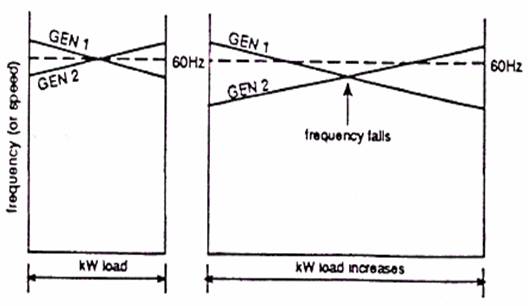
If the characteristics are flat
(isochronous) as shown above then system accuracy is good because frequency
stays constant as kW load changes, but machines cannot be run in parallel. With
flat characteristics the load swings repeatedly from one machine to the other
because the characteristics have no definite crossing point.
The amount of governor droop is a
compromise between accuracy and stability. If the governor droop is large then
the system is stable but the frequency will change slightly as kW load changes
as shown below.